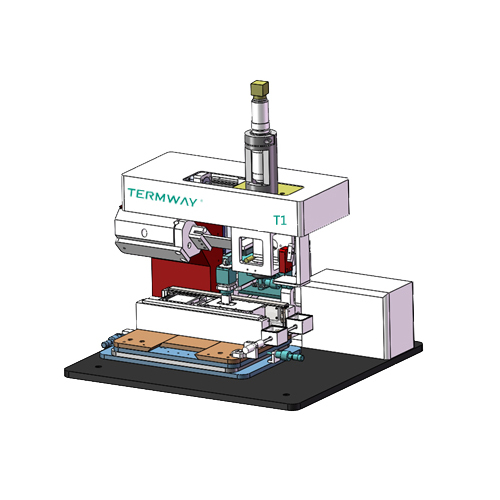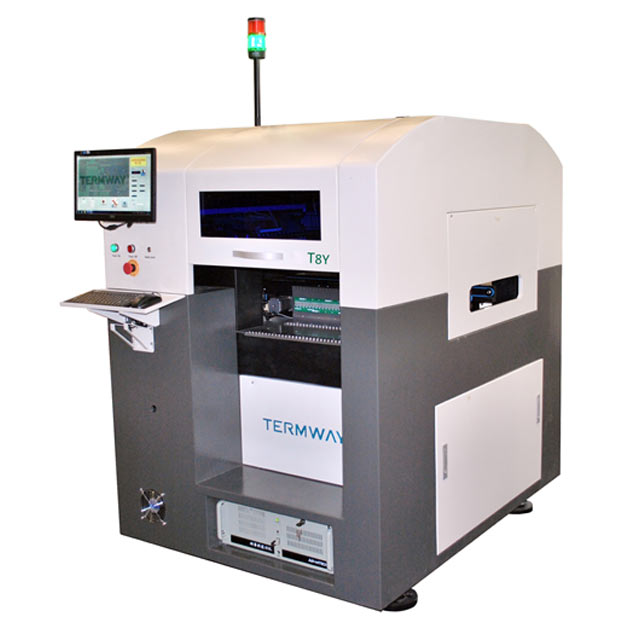
Machine à ruban adhésif submicronique/machine de placement T8W/T8WS
- Introduction:
1. Réalisez la distribution, la viscose, le film collant, le placement, le wafer collant, l'emballage inversé, le GaAs, le contrôle de la pression adhésive, la haute précision.
2. Utilisez une plate-forme de mouvement d'air ultra-précise, le système principal X, Ax Y utilise un encodeur linéaire haute résolution avec un système de flotteur à air sans contact et sans contact. L'échelle de l'encodeur peut atteindre une précision de 0,02 μm, peut atteindre un positionnement à grande vitesse, précis et submicronique.
3. La conception de la plate-forme utilise une plate-forme sportive à grande vitesse intégrée en granit de haute stabilité, de sorte que T8W assure la stabilité thermique et la stabilité mécanique et atteint un temps de démarrage à grande vitesse et ± 1,5 μm et une précision de patch encore meilleure en même temps, afin de répondre les exigences d'application de haute précision.
4. Boîte ou disque d'alimentation: peut contenir jusqu'à 90 gaufres de 2 "x2" ou 24 cartons de 4 "x4" ou plateau combiné.
5. Plaquette pour matériau: peut prendre en charge des plaquettes jusqu'à 8 pouces, équipées d'un dispositif mécanique de dé à coudre à axe Z à entraînement par moteur et d'un anneau en cristal solide.
6. Four eutectique sous vide: utilisez un chauffage infrarouge ou à plaques, chauffant rapidement, mais le rouge, et avec un chauffage à chauffage rapide; jusqu'à 450℃, vide selon la pompe à vide en option, entre 10-4pa-500pa. La température est programmée avec un régulateur de température programmable.

| Modèle | T8WS | T8W |
| Mouvement X/Y | 500*500mm | 650*650mm |
| Encodeur | 50nm ou 20μm fondamentaux | 50nm ou 20μm fondamentaux |
| Resolution | 20nm | 20nm |
| Vitesse de pose | 6500UPH | 6500UPH |
| Vitesse de montage de la puce retournée | 2000UPH | 2000UPH |
| Précision de positionnement | +/-lμm | +/-lμm |
| Répétez la précision de positionnement | +/-0.2μm | +/-0.3μm |
| Rectitude | +/-lμm | +/-lμm |
| Platitude | +/-lμm | +/-l.5μm |
| Précision de placement | <lμm Positionnement radial réel (selon l'application) | <3μm Positionnement radial réel (selon l'application) |
| Répéter la précision du placement | ±lμm@3sigma | ±lμm@3sigma |
| Vitesse maximum | 1000m/s ou 40inch/second | 1000m/s ou 40inch/second |
| Accélération maximale | 2G | 2G |
| Placement de l'axe Z | Selon la pression ou la hauteur | Selon la pression ou la hauteur |
| Contrôle de la pression | Chaque fois que le placement est programmé par un retour en temps réel | |
| contrôle, la plage de pression est de 10 à 2000 grammes | ||
| Mouvement et résolution de l'axe Z | 45mm/0.1um | |
| Précision de remplacement d'angle | O.1°@3sigma | |
| Plateforme de mouvement | Plate-forme en granit massif flottant à l'air de haute précision, pas de pièces en porte-à-faux | |
| Système de mouvement | Cartes de contrôle de mouvement et encodeurs importés | |
| Ruban avec alimentation | 8mm, l2mm, 16mm, 24mm, 32mm, 44mm, peut être installé jusqu'à 32 chargeurs de 8mm | |
| Taille de la puce | minimum 0.15-5mm, remplacer la pointe, la plus grande puce sans la limite réelle | |
| Épaisseur de puce | Coupe ou pièces de soudure de 0.05-2mm d'épaisseur | |
| Poids | 2000kg | 2100kg |
| Dimension | 1730(L) x l400(W) x 1480(H) | 1880(L) x l400(W) x 1480(H) |